Tööstusroboti valimine
Roboti mudel valitakse vastavalt ülesandele, mida soovitakse automatiseerida. Roboti mudeli valimisel tuleb arvestada soovitud tootlikkusega, mida robot peaks tagama. Siinkohal tuleb märkida, et automatiseerimisülesande lahendamiseks on mitmeid viise ja lahendusi. Iga lahendus võib esitada robotile erinevaid nõudmisi, näiteks kas robot hoiab tööriista või hoopis töödeldavat detaili.
Enamasti osutub valituks kõige soodsam lahendus, kuid oluline on ka uue süsteemi tootlikkus. Selleks, et leida sobivaim lahendus, tuleb läbi analüüsida mitmeid võimalusi. Kõige lihtsam on seda läbi viia arvutil, kasutades selleks vastavaid simulatsioone, kus saab proovida erinevaid robotimudeleid. Simulatsioonis olevatel robotitel on 1:1 parameetrid reaalse robotiga.
Tööstusroboti valimise etapid
- 1Eri tüüpi robotid simuleeritakse arvutil
- 2Eellahendus visualiseeritakse 3D keskkonnas
- 3Protsessi simuleerimine
- 4Tsükliaegade väljaselgitamine
Kui süsteemi kontseptsioon on paigas, siis on teada, milline peab olema roboti võimekus. Robotit saab valida roboti andmelehe järgi, kus on kirjas põhilised roboti parameetrid ning nende põhjal saab kindlaks teha, milline mudel sobib ülesande lahendamiseks kõige paremini.
Kahjuks ei ole tööstusroboti valimine nii lihtne, kui esmapilgul tundub, kuna ülesandele sobiva roboti leidmine nõuab automatiseeritava tööprotsessi kohta teatud parameetreid. Näiteks roboti mudel määrab ära siruulatuse ja tööala suuruse.
Roboti paiknemine ruumis määrab ära selle osa, mida on võimalik kasutada tööalast töö tegemiseks. Haruharva esineb olukordi, kus ainult üks parameeter on määrava tähtsusega roboti valimisel. Enamasti on selleks siruulatus, tõstevõime, korduvtäpsus.
Tööstusroboti andmelehelt leiab tavaliselt järgnevad parameetrid:
Roboti tüüp
Roboti täpse mudeli kujutis on enamasti andmelehel pildina välja toodud, millelt on näha, mis tüüpi robotiga on tegemist.
Telgede arv
Telgede hulk on eraldi välja toodud või siis on antud kiirused iga telje kohta, mille järgi saab aimu telgede arvust.
Punkti ja trajektoori korratavus
Punkti ja trajektoori korratavuse täpsused on enamasti arvulisel kujul andmelehel välja toodud.
Liigendite töökäigud ja kiirused
Iga liigendi nurkkiirused ja käiguulatused on enamasti arvuliselt teabelehel välja toodud.
Paigaldusasendid
Juhul kui robot sobib paigaldamiseks mõnes teises asendis kui püstiselt horisontaalsele pinnale (põrandale), siis on see välja toodud. Osad mudelid sobivad paigaldamiseks kaldu nurga all, vertikaalsele pinnale (seinale), horisontaalsele pinnale tagurpidi (lakke).
Mõõtmed ja mass
Teabelehel on välja toodud tööstusroboti mass ja viimaste liigendite gabariitmõõtmed.
Siruulatus ja tööala
On välja toodud arvulise näitajana ning ka graafiliselt, kus on näha tööala suurus ja maksimaalsed ulatuse piirid. Ühel andmelehel võib olla välja toodud mitu erinevat roboti variatsiooni ühest mudelist, erinevate parameetritega, mis põhinevad samal baasmudelil.
Elektritoite vajadus
Elektrivarustuse nõuded võivad olla näidatud roboti kontrolleri teabelehel. Eelnevad andmed olid kõik pärit roboti manipulaatori teabelehelt.
Roboti kaitseklass (IP)
Roboteid valmistatakse erineva kaitseklassiga. Teabelehelt võib leida nii standardmudeli kaitseklassi kui ka saadavalolevaid lisavõimalusi. IP arv näitab seadme kaitsetaset välimõjudele. Esimene number väljendab kaitset tahkete osade vastu. Teine number näitab kaitsetaset vedelike vastu. Lisaks IP klassile on valikus ka veel eritingimustele vastavad mudelid nagu:
- Clean room – elektroonikatööstusele
- Washdown – toiduainetööstusele
- Foundry – kõrgetele temperatuuridele ja rasketes mustades tingimustes töötavatele seadmetele
Tõstevõime
Tõstevõime on teabelehel välja toodud. Ühel ja samal baasmudelil põhineva roboti erinevad mudelite variandid võivad olla välja toodud samal teabelehel. Erineva siruulatusega mudelid on erineva tõstevõimega. Mida kaugemale robot ulatab, seda vähem jõuab ta tõsta. Lisaks sõltub roboti tõstevõime robotile kinnitatava või robotiga haaratava massi massikeskme asukohast, mõõdetuna roboti tööriista kinnituspinnast viimasel teljel. Tõstevõime sõltuvus massikeskme asukohast pole enamasti teabelehtedel välja toodud. Selle kohta on tavaliselt graafik kasutusjuhendis. Kasutusjuhendeid võib ühe seadme kohta olla mitmeid. Osad neist juhenditest on mõeldud roboti operaatorile, osad roboti paigaldajale (integraatorile). Tõstevõime graafik asub integraatorile mõeldud kasutusjuhendis.
Põhilised tööstusrobotite tüübid
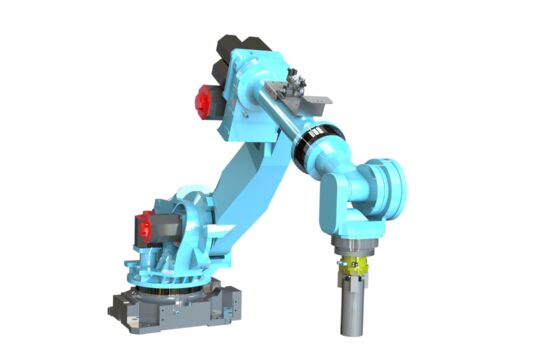
Robotkäsi
või manipulaator on nelja või enama liigendiga robot. Sellist tüüpi roboteid kasutatakse maailmas kõige rohkem, kuna need on väga universaalsed ja täpsed.
Manipulaatortüüpi robot on väga võimekas ja sobib tegema töid alates toodete ladustamisest kuni vastutusrikaste sertifitseeritud keevisõmblusteni välja. Suurem osa seda tüüpi roboteid teevadki keevitustöid. Kõiki käsitüüpi roboteid saab kasutada keevitamiseks,kui neile lisada vajalikud keevitusseadmed.

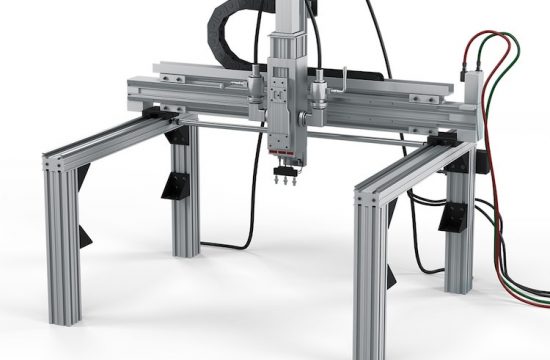
Cartesian robot
koosneb tavaliselt kolmest lineaarteljest. Kolmeteljeline Cartesian robot sarnaneb tööpõhimõttelt laser-, plasma- ja vesilõikuspinkidele, kus lõikepead liigutatakse mööda kolme lineaartelge, et tagada nõutud paiknemine ruumis.
Scara robot
koosneb kolmest pöördteljest ja ühest lineaarteljest. Scara roboteid kasutatakse enamasti kergete ja väiksemate toodete koostamiseks ja komponentide täpseks paigutamiseks. Scara tüüpi robotitd on erinevatest robotitüüpidest ühed kiiremad ja täpsemad ning võtavad vähe ruumi, võrreldes tööulatusega, mida pakuvad.

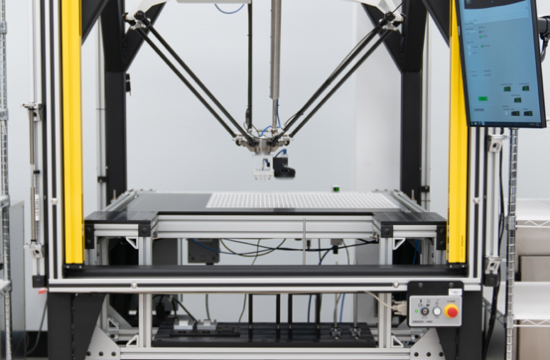
Delta robot
paikneb oma töökoha peal või küljel. Delta robotid on kiired ja liikuvad, kuna roboti liigendid saavad olla väga kerged tänu sellele, et roboti mootorid asuvad statsionaarsel alusel ja need ei liigu roboti töötamisel kaasa. Väike liigendite mass tagab suurima kiiruse ja täpsuse tööstusrobotites. Selliseid roboteid kasutatakse väga palju tootmisliinide kohal, kus tooted liiguvad roboti alt läbi.
Delta robot võib olla ka kuueteljeline, kus kolm lisatelge paiknevad liigendite otsas, mis suurendavad seda tüüpi roboti võimekust, võimaldades tööriista liigutada igas ruumiasendis. Ilma lisatelgedeta paikneb tööriist alati paralleelselt roboti kinnituspinnaga.
Silinder ja Polar robot
Silinder roboti tööalaks on silindrikujuline ala, mille keskmes robot ise paikneb. Polar roboti puhul on tööalaks kera ning robot paikneb tööala keskmes. Mõlemal robotil on neli telge. Erinevus seisneb teise telje tüübis.
Silindrilise roboti teiseks teljeks on lineaarne telg.
Polar roboti puhul on teiseks teljeks pöördtelg.

Koostöörobot
on väliselt hästi kumera kujuga. Kumerad pinnad tagavad suurema kokkupuutepindala, kui toimub kontakt inimesega. Mida suurem on kokkupuutepindala, seda suuremaid jõude talub inimene tundmata valu ja saamata vigastusi.
Selline disain on loodud selleks, et robot sobiks inimesega koos töötamiseks ning ei vajaks eraldi piiratud töökohta. Koostöörobot on ehituselt ja liigendite arvult sarnane käsitüüpi robotile. Koostöörobot võib kujutada endast ohtu inimesele, kui tema otsa kinnitada midagi teravat või muul viisil inimese jaoks ohtlikku.

Vaata ka lisaks veel:
