Haaratsi mudeli valimine
Kuidas valida sobiv haaratsitüüp, et tagada süsteemi töökindlus ja vähendada seisakute aega?
Haaratsi tüübi valimine põhineb peaaegu täielikult toodete omadustel.
- Pneumaatilised pakkidega
- Elektroonilised pakkidega
- Iminappadega vaakumil põhinev
- Svammiga tihendav vaakumil põhinev
- Magnethaarats
- Pakkimishaarats
- Elastsed sõrmedega haaratsid
Metallist pakkidega haaratsid on ühed levinumad. Sellised haaratsid koosnevad kahest või enamast sõrmest. Pakid on siis nagu sõrmed, millega haarats detailist haarab. Selliseid haaratseid on nii pneumaatilisi kui elektroonilisi.
Pneumaatilised pakkidega haaratsid
sobivad kasutamiseks kõvemate materjalide puhul. Suurem osa selliseid haaratseid on suhteliselt lühikese käiguga ühe paki kohta, umbes 15-mm. Kui haarats on kahe pakiga ja mõlemad pakid liiguvad 15-mm, siis toote mõõtmete muutus üle 30-mm tähendab seda, et pakid peavad olema reguleeritavad või tuleb valmistada uued pakid, et haarats sobituks teistsuguste mõõtmetega.
Pneumaatiliselt juhitud pakkidega haaratsid on on/off tüüpi ehk, kas pakid on kinnises või lahtises asendis. Juhul kui pakkide vahel on tõstetav toode, siis hoiab see pakke vahepealses asendis. Toode peab taluma survet, mida pakid sellele avaldavad. Pakkide poolt avaldatavat jõudu ja liikumiskiirust saab reguleerida pneumaatilse rõhu reguleerimisega. Pneumaatilistel haaratsitel on lisavarustusena asendiandurid, mis mõõdavad pakkide asendit. Sisaks asendile saab mõõta, kas toode on haaratsi küljes või mitte. Pakkide asendi ja detaili mõõtmine suurendab robotsüsteemi täpsust ja töökindlust.
Elektrilised pakkidega haaratsid
on haaramisjõult nõrgemad, kuid on täpsemini seadistatavad.
Neil saab seadistada:
- Haaramistugevust
- Kinnise ja lahtise asendi asukohta
- Pakkide liigutamist kuni 10 mikromeetri täpsusega
- Tootest haarates on võimalik mõõta tõstetava detaili mõõtmeid
- Erinevate detaili mõõtmete järgi saab esile kutsuda erinevaid tegevusi roboti tööprogrammis
- Pakkide haardepinna nurk võib olla elektrooniliselt muudetav, mis suurendab nende universaalsust
Elektrilised haaratsid sobivad keskkonda, kus hügieeninõuded on kõrgemad ja suruõhul töötavad haaratsid põhjustaksid probleeme. Paljud elektroonilise täituriga haaratsid on loodud koostöörobotitele.

Magnethaaratsid
sobivad kasutamiseks, kui tooted on materjalist, millele magnetväli avaldab tõmbuvat jõudu.
Magnethaaratsi eelised on:
- Saab tõsta erinevate mõõtmete ja kujuga tooteid, mis mahuvad massilt haaratsi tõstevõimesse
- Toodete mõõtmete muutus ei nõua haaratsi seadistamist
- Saab tõsta detaile, mis paiknevad kitsastes kohtades või külg külje kõrval virnas
Kui tõsta erinevate läbimõõtudega ümaraid detaile, näiteks vahemikus 20mm – 300mm, siis magnethaaratsi puhul võib saada kõik need tõstetud ilma midagi muutmata, kuid pakkidega haaratsi puhul tuleb seda seadistada, vahetada pakke või lausa haaratsit. Magnethaaratsiga õhukesi lehtmaterjalist detaile tõstes tuleb vältida lehe liigset kaardumist, kuna detail võib küljest lahti painduda. Selleks peaks kasutama kahte või enamat haaratsit korraga ühel detailil. Magnethaaratsite lülitus toimub pneumaatiliselt või elektrooniliselt.
Vaakumhaaratsid
sarnanevad magnethaaratsitega, sest nagu magnetki, haarab vaakumiga haarats ennast materjali külge. Vaakumhaarats sobib tõstmiseks parktiliselt kõikidele materjalidele, mis ei ole õhku läbilaskavad ja mille pinnale saab haarats moodustada õhutiheda vaakumühenduse. Vaakumhaaratsitega saab tõsta detaile alates väikestest elektroonikakomponentidest kuni mitmemeetriste vineertahvliteni.
Detailid, mida tõstetakse, peavad olema piisavalt tugevad, et neid tõstes ei laguneks need oma raskuse all koost. Näiteks, tõstes pappkastides olevaid tooteid vaakumhaaratsiga pappkasti pealt, peab olema kast piisavalt tugev, et põhi ei vajuks läbi või pealmine osa ära ei rebeneks. Vaakumhaaratsid töötavad sururõhu toimel.
Vaakumhaaratseid on mitmesuguseid:
- Iminapaga haarats, ühest või mitmest punktist
- Svammiga, jäigal plaadil paiknevad vaakumkanalid
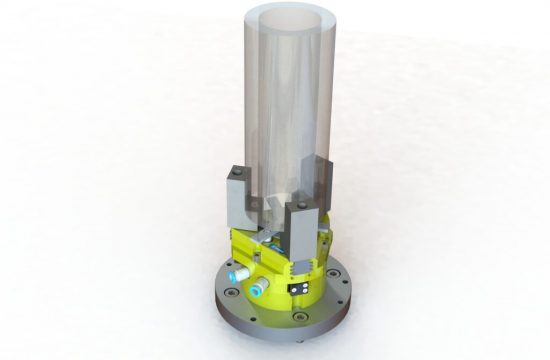
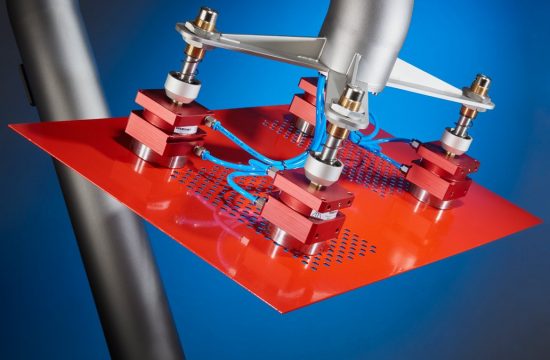
Iminapaga
ehk kummimembraaniga vaakumhaaratsid võivad koosneda ühest või sadadest iminappadest. Iminapad on ehituselt lihtsad, põhiline osa on kummimembraan, mis kinnitub tootele. Kummimembraani sisse tekitatakse vaakum ehk ümbritsevast keskkonnast madalam rõhk, mille abil imeb membraan ennast detaili külge. Membraani tööks vajalik hõrendus tekitatakse suruõhu abil.
Kui väiksemate toodete puhul piisab ühest iminapast, siis suuremate ja elastsemate materjalide juures tuleks iminapad paigutada nii, et hoiavad toodet mitmest punktist.
Iminappadest koosneva vaakumhaaratsiga saab tõsta väga erikujulisi tooteid, kuna haarats on ehituselt lihtne ja iminappasid saab paigutada just sinna, kuhu vaja.

Kui on vaja tõsta ühe haaratsiga erinevate mõõtmetega tooteid, siis peaks haaratsil olema piisavalt iminappasid kõige suurema toote jaoks. Väiksemate toodete tõstmisel võivad jääda osad iminapad vabaks. Selleks peavad olema iminapad varustatud spetsiaalsete klappidega, mis ei lase vabadel iminappadel haaratsi tööks vajalikul alarõhul lekkida. Lisaks vähendavad need klapid energiakulu ja suurendavad haaratsi tõstevõimet.
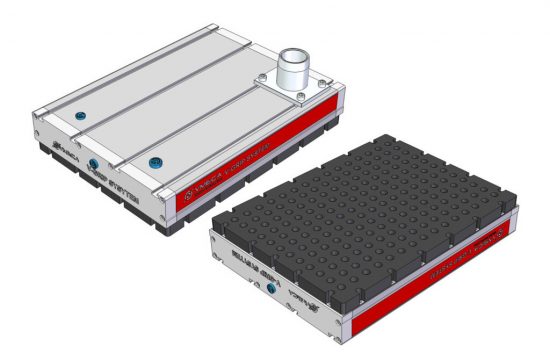
Svammiga
vaakumhaaratsil asuvad vaakumkanalid ühes jäigas tasapinnas, kus õhutihedus luuakse svammi abil. Sellist tüüpi vaakumhaarats võib olla ühe või mitme vaakumkanaliga. Mitme kanaliga haaratsid on varustatud vajalike klappidega, et saaks tõsta väiksemaid tooteid nii, et osad kanalid jäävad toote poolt katmata. Sedasi saab tõsta näiteks euroaluseid olenemata sellest, et osad vaakumkanalid jäävad kahe laua vahekohale. Haaratsil paiknevad vaakumkanalid suhteliselt tihedalt ca. 30 – 40 mm vahedega.
Pakkimishaaratseid
kasutatakse kauba pakkimisel tootmisliinide lõpus, kus robot pakib tooted kaubaalusele. Pakkimishaaratsid võimaldavad tõsta korraga suuremaid koguseid. Lisaks põhitoodetele tõstavad ka kaubaaluseid ja alustele käivaid vahepappe. Toodete ladumiseks kaubaalusele sobib kasutamiseks neljateljeline käsitüüpi robot, väiksem telgede hulk muudab roboti soodsamaks.
Spetsiaalsed haaratsid
projekteeritakse vastavalt ülesandele. Vajadus spetsiaalse haaratsi järele sõltub:
- Toodete parameetritest – mõõtmed, kuju, mass
- Toodete omadustest – haarats peab hoidma teatud toote kuju
- Töökeskkonna tingimustest – haarats töötab eritingimustes
- Haaratsi ülesanetest – haarats peab täitma lisaks tõstmisele veel mõnda ülesannet
Elastsed haaratsid
Aastaid tagasi, kui robotid loodi, sooviti, et need oleksid kiired ja täpsed. Tänaseks on see saavutatud ja robotid teevad hästi oma tööd kindlas keskkonnas. Kuid neile jäikadele liigenditega robotitele ei sobi määramatus ja muutuvad olud. Üha enam liigutakse elastsemate robotite suunas, sest sellised robotid suudavad paremini tulla toime muutuvate oludega, nii on ka elastsete haaratsitega.

Elastne haarats meenutab oma välimuselt inimese sõrmi nii kujult kui liikuvuselt. Haaratsi sõrmed on valmistatud kummist ja jäljendavad haaramisel hästi toote kuju. Haaratsi sõrmede otsad on jäigemad ja suudavad haarata väiksemaid detaile. Haaratsid koosnevad minimaalselt kahest sõrmest.
Elastseid haaratseid liigutatakse suruõhuga, pumbates õhku sõrmede sisemistesse või välimistesse kambritesse, mille tulemusel hakkavad sõrmed kaarduma. Sõrmed on valmistatud elastsest materjalist, aga sõrmede sees on materjal, mis ei veni pikemaks, seetõttu hakkab sõrm kaarduma.
Selliste haaratsite eelised on:
- Võimaldab suuremaid mõõtmete ja kuju muutusi toodetel ilma haaratsit seadistamata
- Võimaldab suuremaid ebatäpsusi toodete ja roboti joondamises
- Ei kahjusta õrnemaid tooteid, kuna haaramisjõud on väiksem ja haaratsid on pehmemad
- Sobib toiduainete tõstmiseks
