Masinnägemine
Kuidas anda tööstusrobotile nägemine ja suurendada paindlikkust muutuvatele oludele?
Masinnägemine on objektide ja ümbritseva keskkonna tuvastamine läbi optiliste kontaktivabade andurite ehk kaamerate. Kaamerapildi abil saab masin informatsiooni, mille põhjal võtab vastu juhtimisotsuseid. Algselt, nagu enamus automaatikasüsteeme, oli masinnägemine keerukas kasutada ja kallis. Viimastel aastatel on seadmete hinnad ja kasutajasõbralikkus paranenud, seetõttu on laialdaselt hakatud kasutama masinnägemise lahendusi.
Siinkohal tuleb märkida, et masinnägemine ei ole võrreldav inimesega, sest masinatel on endiselt keeruline mõista videopilti. Enne masinnägemise lahenduse kasutuselevõtmist tuleb põhjalikult kaaluda selle võimalusi ja sobivust ülesande lahendamiseks. Masinnägemise puhul on võimalus kasutada selliseid kaameraid, millega on võimalik näha valgusspektri neid sagedusi, mis inimsilmale jäävad nähtamatuks, näiteks nagu infrapuna. Masinnägemist on võimalik kasutada kohtades, mis on inimesele ohtlikud või ebatervislikud.
Masinnägemist kasutatakse robootikasüsteemides komponentide:
- Tuvastamiseks
- Positsioneerimiseks
- Mõõtmiseks
Tänu oma omadustele kasutatakse neid ülesannetes, kus on vaja:
- Suurel kiirusel konveieritel liikuvate objektide tuvastamist
- Mikroskoopiliseks kontrolliks, näiteks pinnatöötlus
- Automaatika protsessi järelkontrolliks
- Täpseks kontaktivabaks mõõtmiseks
Põhiliselt kasutatakse masinnägemist tööstusrobotite juures:
- Komponentide haaramiseks ja positsioneerimiseks
- Kvaliteedikontrolliks
- Komponentide tuvastamiseks
- Tähiste ja koodide lugemiseks
Tüüpiline masinnägemise süsteem koosneb kaamerast, valgustusest, pilditöötluse tark,- ja riistvarast. Tarkvara on vajalik videopildi tuvastamiseks ja analüüsimiseks.
Masinnägemise süsteemis on kolm põhilist operatsiooni informatsiooni saamiseks videopildist:
- Kaamera abil filmida videopilti
- Analüüsida videomaterjali tarkvara abil
- Edastada videopildist saadud tulemused
Kõige rohkem mõjutab süsteemi tööd pildi kvaliteet, millest siis süsteem peaks aru saama ja tegema juhtimiseks vajalikke otsuseid. Videopildi jäädvustamisel on väga oluline valgustus. Valgustus mõjutab olulisel määral pildi kvaliteeti. Mida parem on videopildi kvaliteet, seda kiirem ja töökindlam on süsteem.
Turul on saadaval suur hulk erinevaid kaameraid. Kaamera valikul on põhilised parameetrid:
- Resolutsioon iseloomustab, mitmest punktist pilt koosneb
- Vaatenurga laius on fokuseeritud pildi suurus
- Fookuskaugus on kaamera kaugus mõõtepinnast või kehast, kui pilt on fokuseeritud
- Teravsügavus on vahemik, millises ulatuses fookus säilib
Videopildi salvestamisel on kõige tähtsam osa valgustusel. Valgustamiseks on mitmeid võimalusi eest, küljelt või tagant. Lisaks valgustussuunale on ka erinevat tüüpi valgusteid nagu hajutatud valgustus, struktureeritud valgustus, polariseeritud valgustus. Valgustamisel tuleb arvestada ümbritseva keskkonna valgustusega. Kõige parem on, kui ümbritseva keskkonna valgustuse muutus nagu päikese valgus ja ruumi valgustus ei mõjuta kaamerapildi valgustust. Kaamera valgustusel on kaks eesmärki, tuua esile objekti olulised parameetrid ning vähendada ümbritseva keskkonna valgusest sõltuvust ja selle mõjutusi.
Keevitusrobotitel on paigaldatud liitekoha tuvastamiseks kaamera otse keevituspõleti ette, kus kaamera järgi juhitakse põletit täpselt mööda liitekohta. Selleks, et kaamera leiaks liitekoha, näidatakse laseriga liitekohale laserkiire valgust, kaamera pildist on välja filtreeritud kõik ülejäänud sagedusega valguslainete pikkused, mis võivad kaamera tööd segada ning kaamera näeb ainult laserkiirt, mille järgi juhitakse keevituspõleti õiges suunas.
Komponendi valgustamine tagantpoolt, suunaga kaamera poole, võib olla väga kasulik asukoha ja suuruse tuvastamisel, kuna sellisel juhul jääb masinnägemisele nähtavaks ainult komponendi vari, mis on kontrastne ja hästi näha helendavalt taustalt ning lihtsustab kujutise tuvastamist ja tajumist.
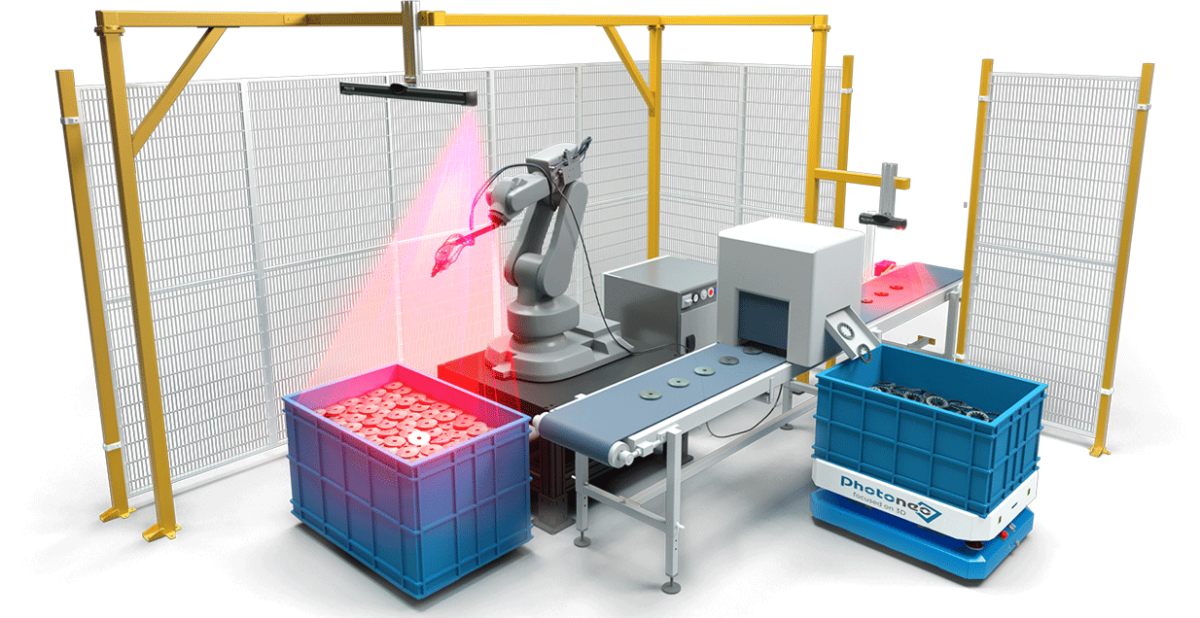
Enim kasutatakse masinnägemist komponentide asukoha ja orientatsiooni tuvastamiseks, mille järgi robotid haaravad komponente.
Informatsiooni analüüsimist videopildilt saab oluliselt lihtsustada, kui eemaldada videopildilt võimalikult palju üleliigset ja mittevajalikku informatsiooni, lisaks parandab see süsteemi töökindlust. Töökindlust võib oluliselt mõjutada ümbritseva keskkonna valgus, seetõttu oleks mõistlik ümbritseda kaamera valguskindla ümbrisega.
Üheks populaarsemaks masinnägemise kasutuskohaks on pakkimine, eriti just toiduainetööstuses. Tihti on toiduained suvalises orientatsioonis enne pakkimist, kui tooted tulevad mööda konveierit. Masinnägemise abil saab määrata nende orientatsiooni ja asukoha ning pakendada seejärel korrektses asendis. Sellised süsteemid koosnevad tavaliselt mitmest robotist. Masinnägemise põhjal saadud info abil jagatakse töökoormus võrdselt robotite vahe. Lisaks asukohtade tuvastamisele saab samaaegselt viia läbi kvaliteedikontrolli. Kvaliteeti saab määrata toodete kuju või tooni järgi, näiteks küpsetustaset.
Masinnägemine annab tööstusrobotitele sellise võimekuse, mida muul viisil pole võimalik saavutada. Selliste süsteemide loomiseks vajalike seadmete hinnad on muutunud soodsamaks ja süsteemide kasutamine lihtsamaks, kuid töötava lahenduse loomiseks ja soovitud tulemuse saamiseks tuleb valida seadmeid hoolikalt ja läbimõeldult.
Vaata ka lisaks veel:
Kuidas valida robotile sobivat haaratsit?
Kuidas tagada automaatika süsteemidele pidev toorme etteanne?
