Transpordi- ja etteandesüsteemid
Kuidas tagada robotile tööks vajalike materjalide ettesöötmine, et vähendada tööseisakuid ja suurendada tootlikkust.
Tootmisprotsesside juures on oluline, et protsessid oleksid võimalikult efektiivsed. Selleks, et neid protsesse saaks teostada, peavad olema automaatikasüsteemidel transpordi- ja etteandesüsteemid, et tööks vajalik:
- Materjal oleks õiges kohas
- Õigeaegselt
- Õiges koguses
- Vigastamata

Tootmisprotsesside juures on oluline, et protsessid oleksid võimalikult efektiivsed. Selleks, et neid protsesse saaks teostada, peavad olema automaatikasüsteemidele transpordi- ja etteandesüsteemid, et tööks vajalikud:
- Materjalid oleks õiges kohas
- Õigeaegselt
- Õiges koguses
- Vigastamata
Puudulik materjalide käitlussüsteem põhjustab:
- Lisatööd
- Lisakulusid
- Halba ülevaadet tootemahtudest
- Lisa transportimist
- Toodete vigastamist
- Praagi teket
Automaatikasüsteemi efektiivseks toimimiseks on oluline, et süsteemil oleks töötamiseks vajalik tooraine alati saada ja töödeldud tooteid oleks võimalik süsteemist välja saata. Selleks tuleb robootikasüsteemi konstrueerimisel valida sobivad tööstusrobotite etteandesüsteemid, sest automaatika ise ei lahenda seda probleemi. Tooraine kättesaadavus mõjutab otseselt kogu süsteemi efektiivsust ning operaatori hõivatust. Etteandmiseks ja eemaldamiseks on võimalik kasutada:
- Konveiereid
- Automaatselt liikuvaid sõidukeid
- Söötureid
[aiovg_video type=”youtube” youtube=”https://youtu.be/VNM8ThOm2lk” ratio=”50″ autoplay=”1″ loop=”1″]
Transpordisüsteemid
Konveierid

Konveiereid saab kasutada osade liigutamiseks masinate vahel või automaatikasüsteemis sees, näiteks saab mööda konveierit juhtida robotile ette tooteid, mida konveieri lõpus robot pakib kaubaalusele. Konveieritega saab tagada toodete liikumise punktide vahel nii, et konveier paikneb põrandal, põranda kohal või kõrgemal lae all. Konveieri tüüp sõltub toodetest, mida liigutatakse, kui palju on ruumi konveieri paigaldamiseks ja teiste seadmete paigutusest tehases. Konveierid on peamiselt mõeldud suuremal hulgal toodete transportimiseks, lisaks pakuvad konveierid seadmete vahel puhvreid, kus saab paikneda teatav varu materjali automaatikaseadmetele nende tööks.
Konveiereid on kahte tüüpi: kas pidevalt liikuvad või intervallidega liikuvad. Pidevalt liikuvad konveierid töötavad peatumata ja robotid haaravad tooteid konveierilt liikumise pealt.
Pidevalt liikuvaid konveiereid kasutatakse värvimisel, kus tooted liiguvad kindlas tempos. Selline lahendus tagab toodetele ahjus kindla kuivatusaja ning ühtlustab toodangu kvaliteeti.
Intervallidega konveierid liiguvad kindla distantsi ning seiskuvad, näiteks ühe toote jagu edasi. Sellist tüüpi konveiereid kasutatakse koostamisel nagu autokerede valmistamisel, kus autokered peatuvad kindla vahemaa tagant erinevaid toiminguid tegevate robotite juures. Selliste konveierite taktiaeg sõltub kõige pikema operatsiooni pikkusest, mida selle konveieri peal tehakse.
Automaatikasüsteemis võivad olla kasutusel väikesed konveierid, mis tagavad robotsüsteemile automaatse valmistoodete äraveo ja uute komponentide söötmise robotsüsteemile.
Automaatselt liikuvad sõidukid AGV

Automaatselt liikuvad sõidukid ehk AGV (Automated guided vehicles). Neid saab kasutada transportimiseks, aga võrreldes konveieritega, on need palju paindlikumad ja ei võta enda alla tootmispinda. Sellistel iseliikuvatel sõidukitel on küll suurem paindlikkus, kuid tootlikkus on konveieritest väiksem ja need ei pruugi tagada toodete puhvrit eri tootmisprotsesside vahel.
AGV liiguvad samas ruumis, kus tehase töötajad ja teised transpordivahendid nagu tõstukid. AGV on varustatud ohutusseadmetega, mis hoiab ära kokkupõrked inimeste ja teiste sõidukitega. AGV on küllalti aeglased ja nende kandevõime on sõltuvalt mudelist 100 – 1000 kg (tootja MIR valikus) ning transporditavate kaupade mõõtmed peaksid sobima sõiduki mõõtmetega.
Etteandesüsteemid
Automaatne toodete etteandesüsteem

Automaatikasüsteemides on vajalik, et töödeldavad tooted jõuaksid süsteemi. Kõige lihtsam viis selleks on käsitsi laadimine rakisesse, näiteks keevitusrobotile kokkukeevitavate osade kinnitamine rakisesse. Lisaks on võimalik seda teha automaatselt, kus konveieri abil jõuavad tooted eelmisest töötlusetapist järgmisesse etappi. Mõnede süsteemide puhul nagu koostamine on vaja robootikasüsteemile ette anda pidevalt suures mahus komponent.
Komponendid, mida automaatikasüsteemile ette antakse, võivad olla näiteks kruvid või poldid. Sellised etteandesüsteemid peavad olema väga töökindlad, sest automaatikasüsteemi töö sõltub täielikult etteantavatest toodetest. Lisaks peab etteandesüsteem tagama, et komponendid oleksid õiges asetuses. Positsioneerimise probleemi lahendab täidetavate kassettide või vööde kasutamine. Nende puuduseks on uuesti laadimisele kuluv aeg. Juhul kui sisestatavad komponendid tulevad suuremas koguses, kastides suvaliselt paigutatuna, suurendab see omakorda täitmisele kuluvat aega. Suvaliselt paigutatud toodete positsioneerimiseks ja ettesöötmiseks robootikasüsteemile sobib kaussöötur.
Etteantavate komponentide kuju ja mõõtmed mõjutavad etteandesüsteemi ülesehitust ja keerukust, mis omakorda mõjutab etteandesüsteemi hinda. Kui komponendid on sümmeetrilised, siis see muudab positsioneerimise lihtsamaks. Kui osad on asümmeetrilised, võib olla kasu sorteerimisel nende massikeskmest, mille abil saab need ühtemoodi positsioneerida. Etteandesüsteemi valikul ja kavandamisel tuleb kindlasti lähtuda komponentidest.
Kaussöötur
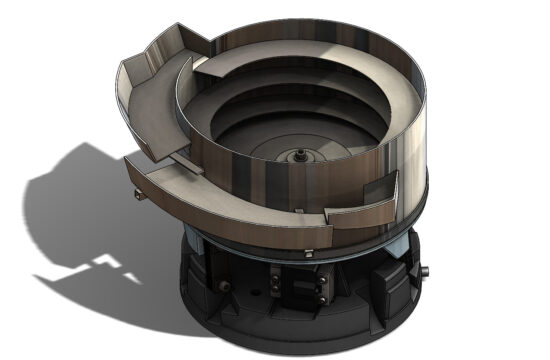
Kaussöötur koosneb kausist ja elektromagnetist. Kausi sees on spiraalne tee, mis kulgeb mööda kausi väliskülge ning mööda spiraali liiguvad komponendid kausi põhjast üles, kausist välja. Komponendid hakkavad liikuma vibratsiooni mõjul, mida tekitab elektromagnet. Kui tooted liiguvad mööda spiraali kausist välja, positsioneeritakse neid sellel teel, kasutades erinevaid takistusi ja suunajaid, mis lasevad minna edasi ainult korrektses asendis komponentidel. Ülejäänud kukuvad kaussi tagasi ning alustavad uuesti liikumist mööda spiraali, kuniks saavutavad sobiva asendi ja pääsevad kausist välja. Kausi suurus sõltub enamasti komponentide mõõtmetest.
Kaussööturi täitmine saab olla manuaalne või automaatne. Kaussööturid on ehituselt väga lihtsad ja töökindlad seadmed. Kaussööturi täitmine toimub lihtsalt komponentide kaussi valamisega. Kasusöötur sobib paljude erinevate komponentide söötmiseks. Selle valimisel on kõige olulisem kausi õige kuju, et komponendid liiguksid mööda spiraali üles. Spiraali kallak peab olema sobiv, lisaks peavad korrektselt töötama erinevad suunajad, mis määravad korrektse komponendi asendi. Kausi õige kuju leidmine on pigem loominguline protsess, kus tuleb kasuks eelnev kogemus. Kaussööturiga ei saa sööta komponente, mis võivad jääda üksteise külge kinni.
Lineaarsöötur
Lineaarsöötur töötab sarnasel viisil kaussööturiga, kus komponendid liiguvad vibratsiooni mõjul sirgelt mööda tasapinda. Selliseid seadmeid kasutatakse kaussööturi ja automaatikasüsteemi vahel, kus lineaarne söötur on kaussööturi pikendus või laetakse lineaarseid söötureid käsitsi, millele mahub siis teatav maht automaatika tööks vajalikke komponente. Lineaarsed sööturid ei positsioneeri komponente, vaid ainult liigutavad neid edasi. Nendega saab sööta suuremaid komponente kui kaussööturiga. Komponentide positsioneerimiseks saab kasutada masinnägemisega robotit, kus robot võtab suvaliselt paigutatud komponendid ja asetab tooted korrektses asendis.
Pneumaatiline söötur
Pneumaatiline söötur sisuliselt puhub komponente mööda toru. Sellisel viisil liiguvad söödetavad osad väga kiiresti. Pneumaatilise sööturiga ei saa sööta väga suuri komponente. Toru, mida mööda komponendid liiguvad, on võimalik teha küllaltki pikk ja vedada mööda keerukat trajektoori. Lisaks võib sööturi toru ots olla liikuva masina osa küljes. Sellisel viisil söödetakse enamasti kruve ja neete.
Ribasöötur
Söötur, kuhu komponendid sisestatakse ribade küljes. Komponendid tulevad koos ribadega ning söötur võtab komponendid automaatselt nende küljest. Sellist lahendust kasutatakse tihti elektroonikatööstuses.
Kassettsöötur
Kassettsööturi jaoks peavad olema komponendid eelnevalt sobivalt pakendatud kas alusele või dosaatorisse. Alustele pakitakse komponente, mis on õrnad või mille õige orientatsioon on tähtis ning seda on muul viisil keeruline saavutada. Alused on suhteliselt soodsad, kuna neid valmistatakse vormimise teel. Alustele paigutatud komponente on lihtne transportida, kuna alused kaitsevad komponente vigastuste eest ja neid saab virnastada üksteise peale. Komponentide laadimine alustelt automaatikasüsteemi eeldab mingit sorti seadet, mis need alustel võtab ja positsioneerib need sobivalt automaatikasüsteemile.
Vaata ka lisaks veel:
