AUTOMAATNE PAKKIMISLIIN PELLETI KOTTIDE KAUABAALUSELE PAKKIMISEKS
Täisautomaatne pakkimisliin pelletikottide kaubaalustele pakkimiseks. Süsteemi ühes otsas sisestatakse tühjad alused ning teises otsas väljuvad laetud ja kiletatud alused. Kogu süsteemi juhib üks juhtmoodul, mis tagab kontrolli kõigi seadmete üle ning kindlustab ohutuse seadmete operaatoritele.
Ettevõtte taust ja väljakutse: Kronopal OÜ
Kronopal OÜ, Jõgeval asuv küttegraanulite tootja, seisis silmitsi töömahuka ja ebaefektiivse protsessiga, kus liini operaator pidi käsitsi tõstma ja vedama raskeid kaubaaluseid. Piiratud eelarvest hoolimata soovis ettevõte leida kulutõhusa lahenduse, mis aitaks tootmisprotsessi täielikult automatiseerida ja vähendada töötajate füüsilist koormust. Pakkusime ettevõttele võimalust võtta kasutusele kasutatud robot. Loe Kronopali kogemusest kasutatud robotiga meie blogist.
Süsteemi kirjeldus:
Süsteem koosneb
- 10 konveierist
- Alusesöötjast
- Täisautomaatsest kiletajast
- Roboti laadimiskohas tühja aluse positsioneerijast
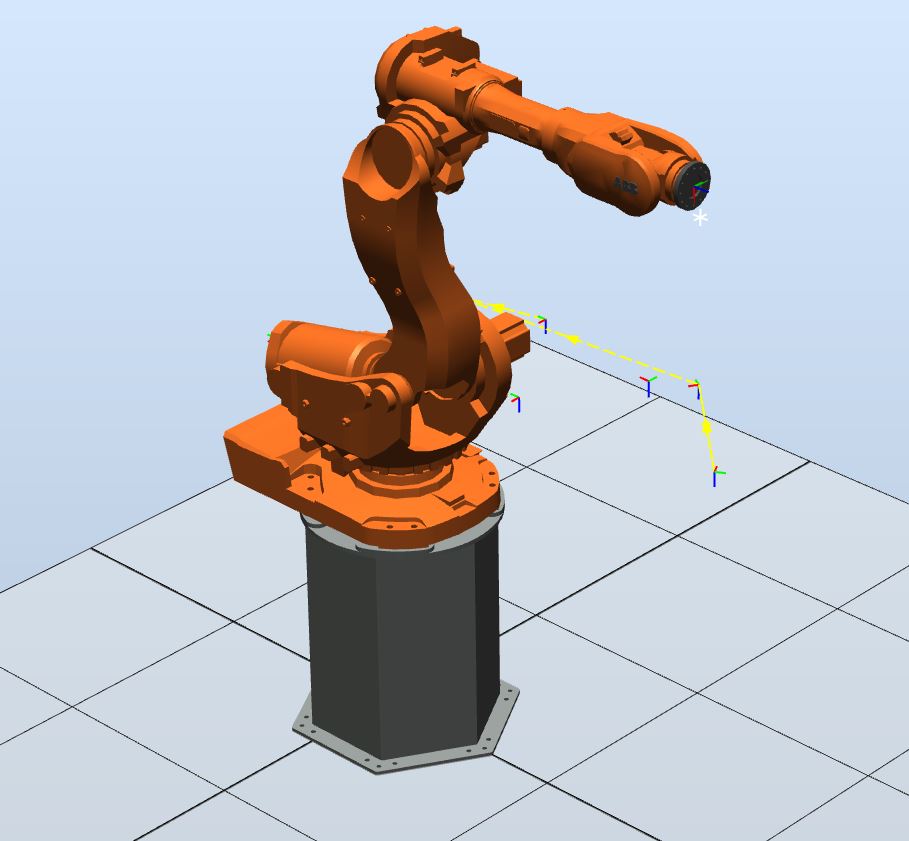
- Robot ABB IRB 6600 225/2.55
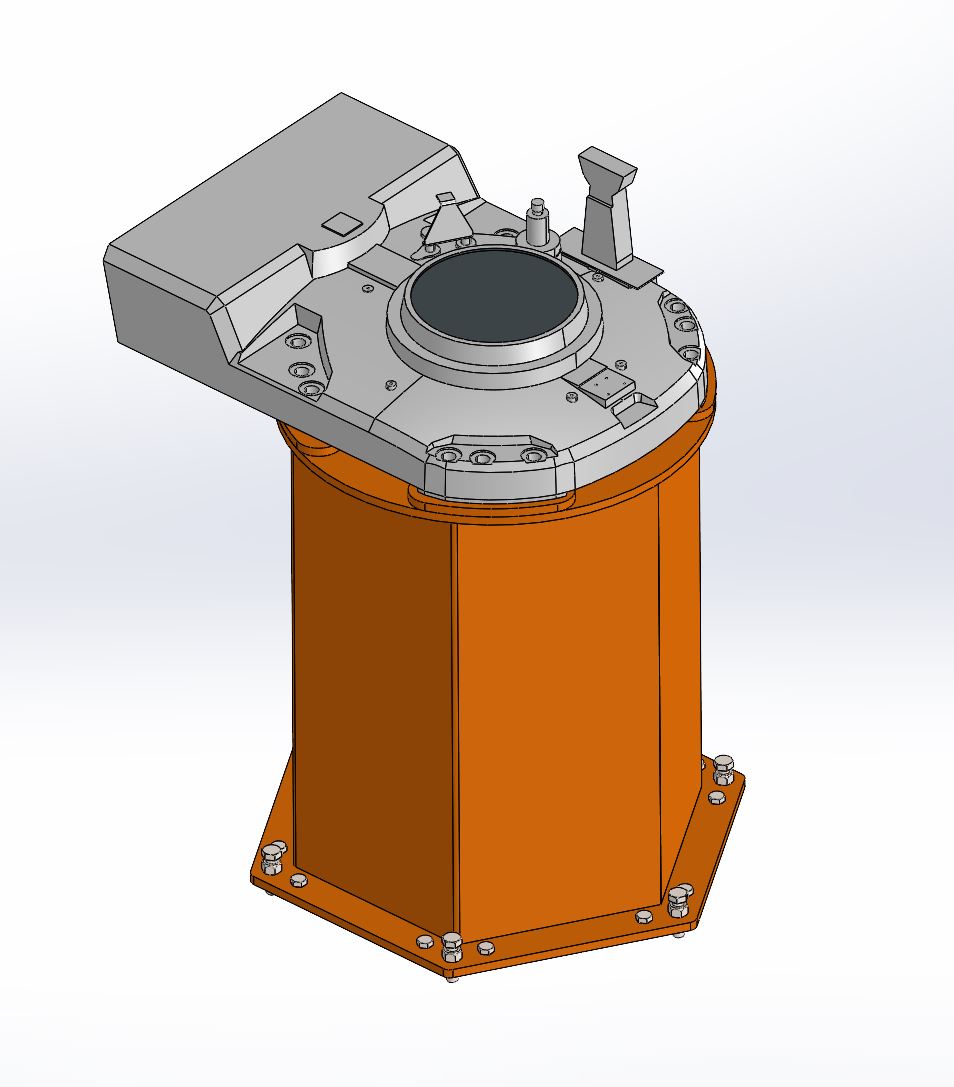
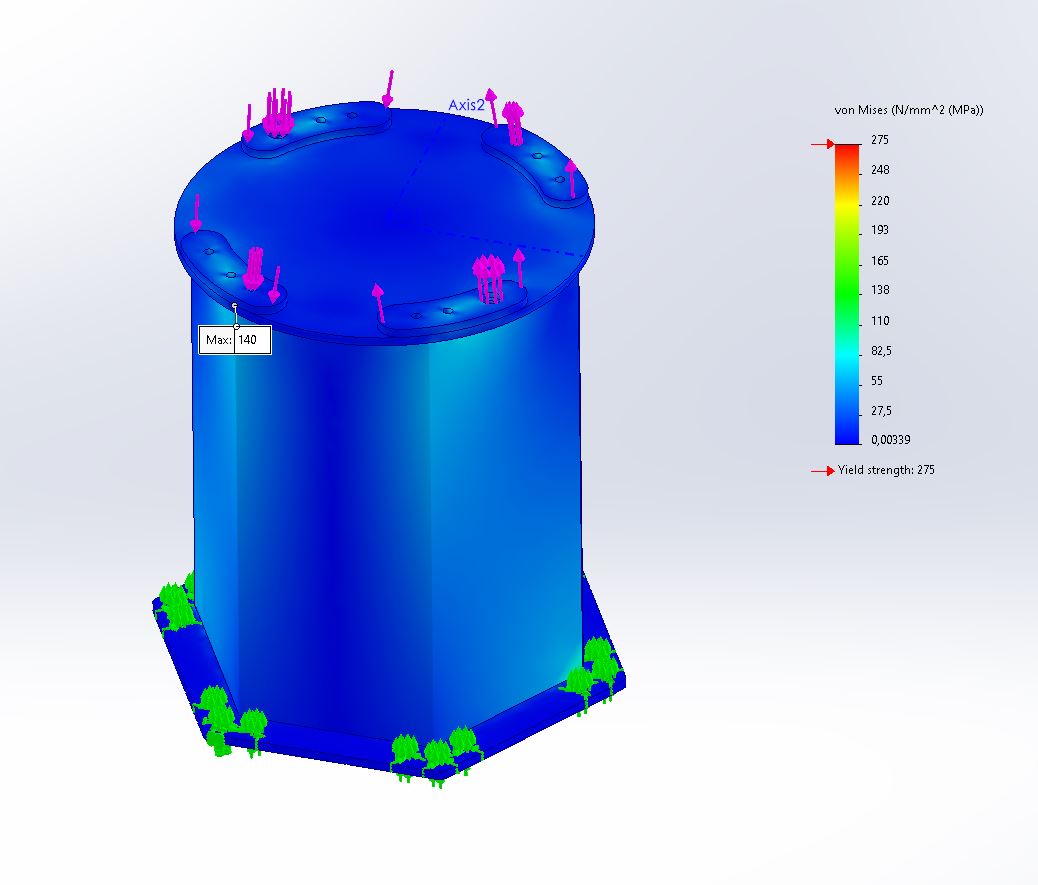
- Roboti alus
- Sick valguskardinad
- Siemens S7 juhtmoodul
Tühjad kaubaalused tõstetakse liini alguses olevale alusesöötjale, mis annab robotile ükshaaval tühje aluseid ette. Tühjad alused juhitakse konveierite abil robotini, kus aluste positsioon korrigeeritakse pneumaatilise piiraja ja külgsuunalise surujaga. Seejärel alustab ABB IRB 6600 robot pelletikottide ladumist kaubaalusele.
Kui alus on laetud, liigub see automaatsesse Atlanta alusekiletajasse. Pärast kiletamist suunatakse alus lattu, kus täis alused laaditakse konveieri otsalt maha kahveltõstukiga. Pakkimisliinile mahub kuni kuus täis alust.
Kogu tööala on piiratud mehaaniliste piirete ja optiliste anduritega, et vältida inimeste sattumist ohutsooni. Sissepääsud tööalasse, mille kaudu laaditakse süsteemile tühje aluseid, on kaitstud valguskardinatega. Samuti on piiratud ligipääs tööalasse lao poolt valguskardinatega. Valguskardina läbimisel seiskuvad tööalas kõik masinad. Tööalast lahkudes saab seadmed uuesti käivitada ühe nupuvajutusega.
Lisaks on kõik sissepääsud varustatud hädaseiskamisnuppudega, mille abil on võimalik ohuolukorras peatada tööalas kõik masinad koheselt.
Projekti tasuvus ja tulemused
Investeering tasus end ära umbes ühe aastaga tänu tööjõukulude vähenemisele. Tänu automatiseerimisele:
- Käsitsi töö vähenes: Operaator ei pea enam kandma 15-kilogrammiseid kotte ega aluseid liigutama.
- Tööjõukulud langesid: Varem nõudis töö nelja operaatorit, kuid nüüd piisab kahest.
Miks valida kasutatud robot?
- Kuluefektiivsus: Vähekasutatud roboti abil on võimalik säästa kuni 30% projekti kogukuludest.
- Konkurentsivõime: Kuna vähekasutatud robotid on odavamad, saavad neid lubada endale ka väiksemad ettevõtted, et püsida konkurentsis.
- Tööressurss: Kasutatud robotitel on tihti üle 90% tööressurssi alles.
Taaskasutus: Projekti käigus taaskasutati vana roboti ja konveieri komponente, vähendades lisakulusid.
Täisautomaatne pakkimisliin pelleti kottide kaubaalusele pakkimiseks.
- Tootlikus: 1 alus virnastatakse ja kiletatakse 20 minutiga (pelletite kottidesse pakkija võimekus)
- Puhver: 6 täis alust.
- Alusesöötja maht: 15 tühja alust
- Automaatne laua puhastus
- Eriolukorras võimalik juhtida kõiki seadmeid manuaalselt nuppude abil
- Turvalahendused: Masinate tööala on piiratud valguskardinatega ja piiretega, et vältida inimeste sattumist tööalasse.